Il motore Passo-passo
Principio di funzionamento.
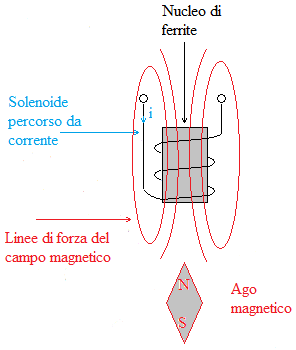
Un solenoide percorso da corrente genera un campo magnetico nello spazio circostante, il cui verso dipende dal verso della corrente nel solenoide.
Le linee di forza del campo magnetico sono chiuse. All'interno del solenoide sono pressochè rettilinee.
Se in prossimità del solenoide si avvicina un ago magnetizzato, questo, allineandosi con l'asse del solenoide, mostra la polarità del campo.
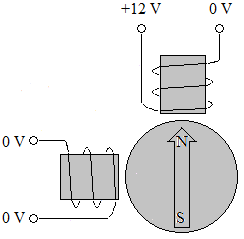
Si dispongano due solenoidi in modo che i loro assi formino 90°. All'intersezione degli assi dei due solenoidi si posizioni un disco libero di ruotare.
Se il disco è magnetizzato in senso radiale, allineerà il suo diametro magnetizzato con l'asse del solenoide percorso da corrente.
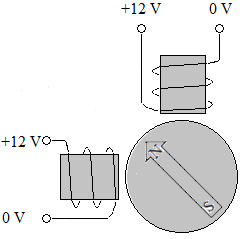
Se i due solenoidi vengono alimentati contemporaneamente, il rotore posiziona l'asse magnetizzato con una inclinazione di 45° rispetto alla direzione del campo di ciascun solenoide.
Pilotaggio unipolare.
Un solo avvolgimento è alimentato: su un capo si applica la tensione di alimentazione, mentre l'altro estremo è collegato a massa.
Per mettere in rotazione un motore passo-passo è necessario commutare il flusso della corrente di eccitazione da unavvolgimento all'altro.
Ciò produce un campo magnetico rotante che trascina il rotore.
La velocità di rotazione è determinata dalla velocità con cui viene commutata l'alimentazione degli avvolgimenti, il senso di rotazione è determinato dalla particolare sequenza di commutazione.
Il problema principale di questo tipo di pilotaggio è la tendenza del rotore ad oscillare prima di assestarsi nella nuova posizione di equilibrio.
 |
 |
 |
 |
L'avvolgimento A è alimentato: il campo magnetico attrae il polo Nord del rotore. |
L'alimentazione dello statore A viene tolta, il campo magnetico scompare, viene applicata una tensione all'avvolgimento B, il rotore, attratto dal campo, ruota di 90°. |
Viene alimentato l'avvolgimento dell'espansione polare C e il rotore compie una rotazione di 90°. |
L'alimentazione viene commutata dall'espansione polare C alla D. |
Il campo magnetico generato intorno ad una espansione polare dello statore ha anche lo scopo di bloccare l'albero del rotore contro l'azione della coppia esterna esercitata dal carico
Nel pilotaggio unipolare si può raddoppiare la potenza alimentando contemporaneamente due avvolgimenti opposti.

Il pilotaggio unipolare di un motore passo-passo può essere realizzato usando un transistor, in configurazione "on-off" per ciascun avvolgimento.
Un livello logico alto sulla base commuta il transistor in saturazione (interruttore chiuso) e l'avvolgimento risulta alimentato.
Un livello logico basso sulla base commuta il transistor in interdizione (interruttore aperto) e l'avvolgimento non risulta alimentato.
La velocità con cui il livello alto viene shiftato sulle basi dei transistor determina la velocità angolare.
Motore passo-passo bipolare.

Un avvolgimento di statore continua sull'avvolgimento dell'espansione polare opposta. In questo modo si eccitano sempre due poli opposti.
Se si osserva la sequenza di pilotaggio degli avvolgimenti, si nota che il circuito di alimentazione deve invertire la direzione della corrente nel solenoide.

Si consideri lo schema in figura. Se i transistor Q1 e Q4 sono ON e i transistor Q2 e Q3 sono OFF, la corrente segue il percorso della freccia 1, e le due espansioni polari dello statore generano il campo magnetico in un determinato verso
Quando occorre invertire il verso del campo, bisogna scambiare lo stato dei transistor: Q2 e Q3 nello stato ON e Q1 e Q4 nello stato OFF. La corrente segue il percorso indicato dalla freccia 2.
Pilotaggio bipolare a mezzo passo.

Per ridurre il rischio di oscillazioni intorno alla posizione di equilibrio, il motore viene pilotato a mezzo passo, alternando l'alimentazione di una fase con l'alimentazione di due fasi. Il questo modo il rotore compie rotazioni di 45°.